SAE(美国汽车工程师学会)在2014年发布 J3016 标准 Taxonomy and Definitions for Terms Related to On-Road Motor Vehicle Automated Driving Systems,该标准的主要目的是统一业界自动驾驶等级的定义,主要内容包括:
- 将驾驶从纯粹手动驾驶到完全自动驾驶分为6个等级,即L0 ~ L5
- 各个自动驾驶等级与技术水平的对应关系
- 各个自动驾驶等级,技术水平之间递进式区别
SAE 定义的 6 个等级描述如下表(Link),其中 L0 表示没有任何自动驾驶手段,即传统的手动驾驶;L5 表示完全自动驾驶,整个驾驶过程无需人类参与;L1 ~ L4 为辅助驾驶(ADAS)阶段。
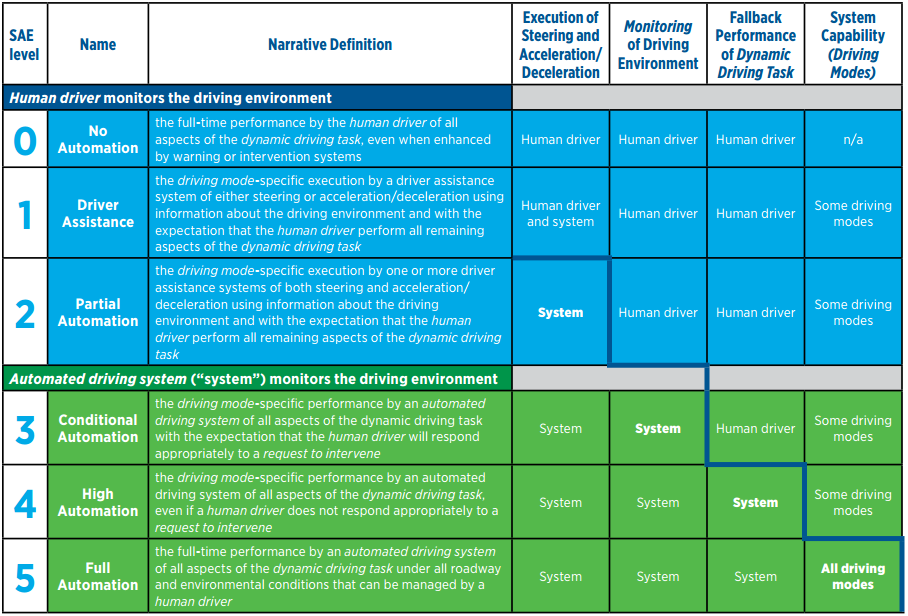
技术的发展并非一蹴而就,从手动驾驶到完全自动驾驶,其中必然将经历相当长的缓冲时期,因此统一自动驾驶等级的概念,意义是显而易见的。它有助于消除业界(工程/法规/媒体等)概念的混淆,对不同自动驾驶能力的车辆,进行区别对待。其它机构也定义过自动驾驶等级,比如 NHTSA (美国高速公路安全管理局),只不过定义不如SAE定义详细,如今已废弃,改为采用 SAE 的定义。
车辆自动驾驶等级的差异,体现在它们可以实现不同类型的自动驾驶功能,列举的自动驾驶功能包括:
- ACC Adaptive Cruise Control
- AEB Advanced Emergency Brake
- AP Automatic Pilot
- BSD Blind Spot Detection
- DM Driver Monitor
- FCW Forward Collision Warning
- LC Lane Centering
- LDW Lane Departure Warning
- LKA Lane Keeping Assist
- PA Park Assist
- PCW Pedestrian Collision Warning
- PDS Pedestrian Detection System
- RCTA Rear Cross-Traffic Alert
- RCW Rear Collision Warning
- TJA Traffic Jam Assist
- TLR Traffic Light Recognition
- TSR Traffic Sign Recognition
- ……
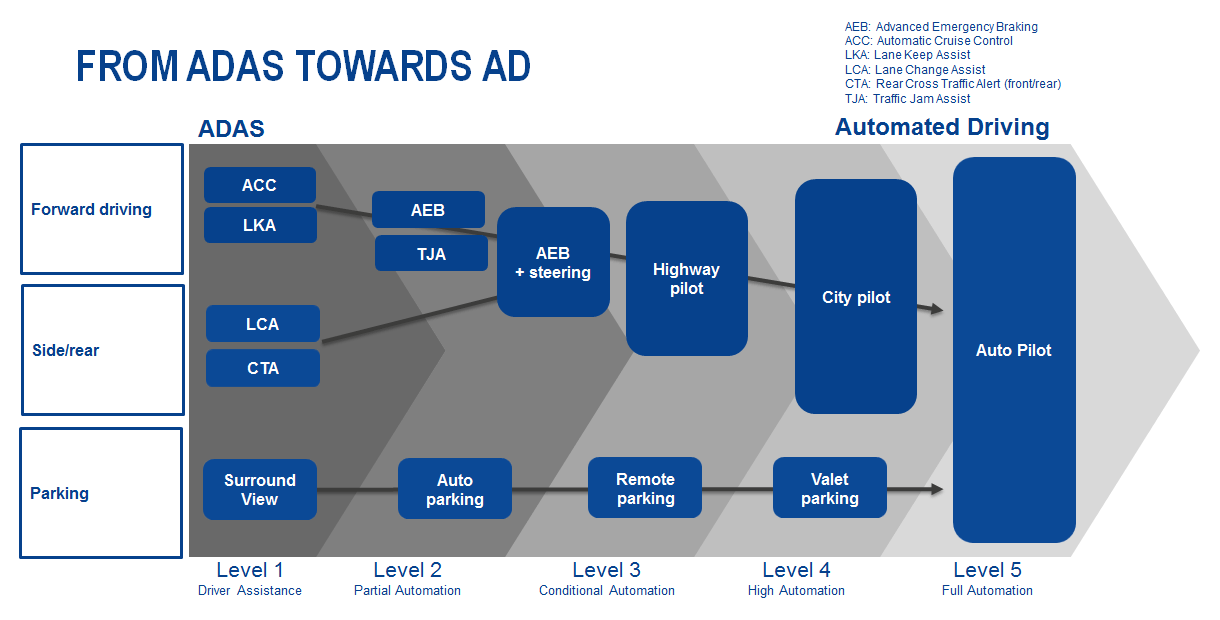
在 RENESAS 的自动驾驶的介绍文章中,它描述从辅助驾驶(ADAS)到完全自动驾驶实现功能进阶的路线图,如下图。
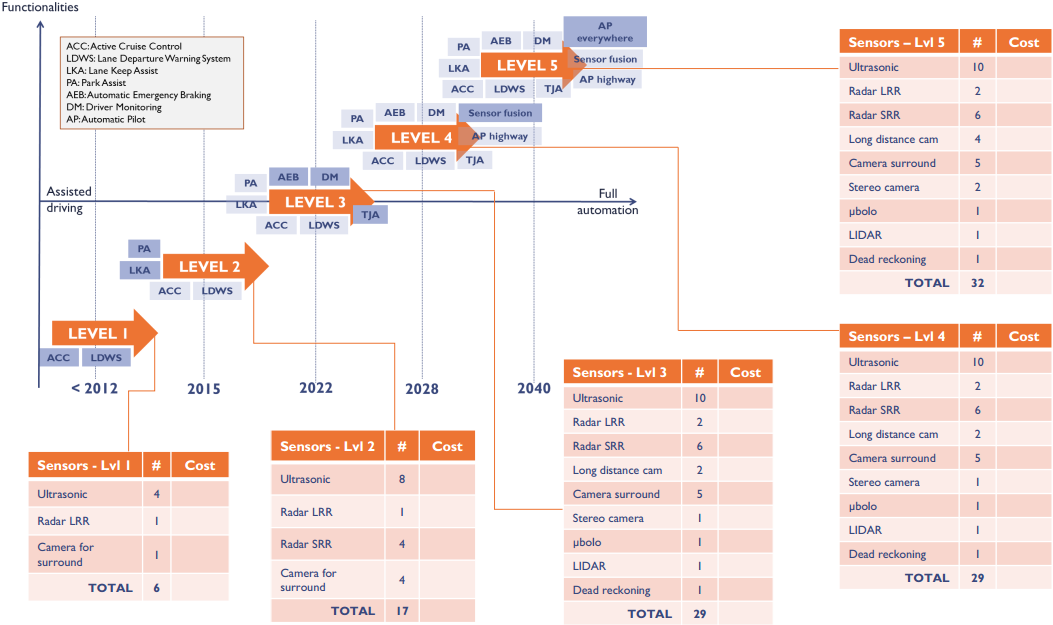
不同自动驾驶等级汽车,对于传感器的要求也不尽相同。基本上,自动驾驶等级越高,要求越多的传感器,对传感器数据融合要求也越高。随着自动驾驶等级的提高,感知层面的配置大概分三个阶段:
- Single Sensor
- (Multi-) Sensor Data Fusion
- (Multi-) Sensor Data Fusion + Map
下图为市场调研机构 Yole 对于不同等级自动驾驶需求传感器数量的预测。