


概述
LiDAR,是英文 LIght Detection And Ranging 的缩写,中文名称激光雷达。顾名思义,激光雷达是通过发射激光光束探测目标位置、速度等特征的雷达系统。激光雷达在短时间内向周围环境发射大量光子,通过测量反射回来光子的飞行时间(TOF, Time of Flight),计算与周围物体的距离。激光雷达可以在瞬间构建周围环境的3D地图,具有测量精度高、方向性好等优点。
早期激光雷达主要用于军事和民用地理测绘(GIS)等领域,比如地质测绘、监测树木生长、测量建筑项目进度等。随着自动驾驶的兴起,对于环境感知要求日趋严格,激光雷达在自动驾驶领域的应用也越来越广泛。相比于其它类型的自动驾驶传感器,比如摄像头,激光雷达探测的距离更远,精度更高。由于为主动发射光子,LiDAR较不易受周围环境弱光、雨雪烟尘的影响(相对摄像头而言),而且摄像头在进行图像识别处理时需要消耗大量的处理器能力,而激光雷达产生的3D地图信息更容易被计算机解析。相比毫米波雷达,激光雷达的分辨率更高,并且毫米波雷达也不适用于行人检测和目标识别等工作。在自动驾驶领域,激光雷达与其它传感器互为补充,可以有效提高车辆对于周围环境感知的准确度。
有一种说法,激光雷达是实现 Level 3 和 Level 4 自动驾驶等级的必要条件。目前,以 Google 为代表的部分自动驾驶公司选择激光雷达作为其自动驾驶车辆的主力传感器,而以 Tesla 为代表的其它公司,则可能在考虑激光雷达成本过高等因素后,选择其它传感器组合替代激光雷达的功能。图1表示各种自动驾驶传感器的特性对比,可见激光雷达在探测距离、分辨率和弱光工作性能上有比较优势,详细说明参考链接。
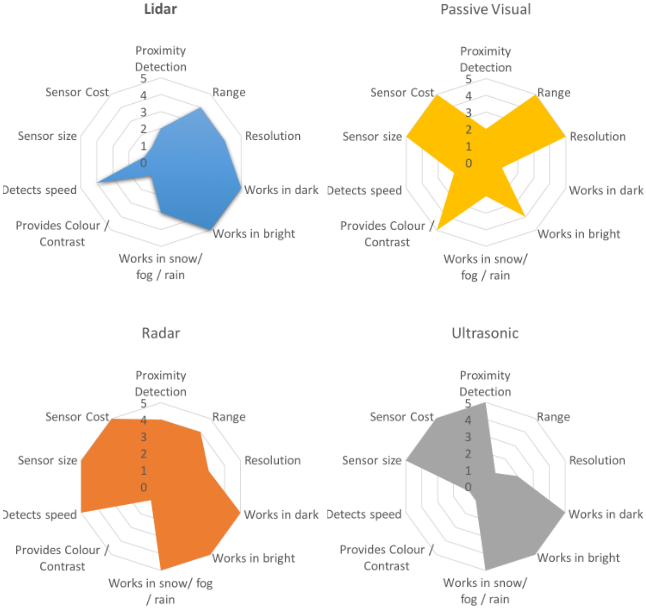
图1.自动驾驶传感器特性
工作原理
想象在漆黑的房间,你看不见任何物体,手里只有一根打狗棒……
首先,你用打狗棒探测前方(水平),在2m的位置打狗棒碰到物体;接着,你往左边探测,在3m的位置打狗棒又碰到物体;再向右边,4m;后方,5m……这样,即使你没有移动,也看不到任何物体,你依然可以获知自己四周的基本信息。再往其它各个方向,如此反复下去,只要记忆力足够好,你就大概可以根据周围物体与你的距离信息,判断房间的基本轮廓(二维),如下图2示。
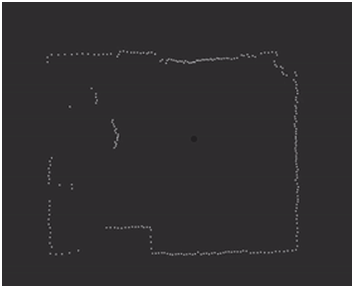
图2.房间的2D扫描图
进一步地,不仅在水平方向,你拿打狗棒向上或向下探测,这样你可能会碰到椅子、门等,间接地获得这些物体轮廓的信息,这些信息叫做点云(Point Cloud),它指的是3D坐标系中物体外观表面的点数据集合。只要有足够的点,你就可以得到房间详细的点云表示,如图3。
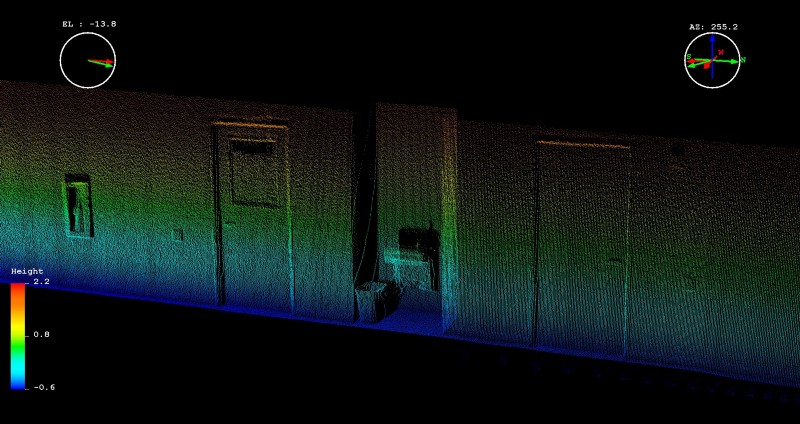
图3. 房间的3D扫描图
简单地说,激光雷达就是快速创建周围环境点云的设备。激光雷达在工作时不断地向周围环境发射光子(打狗棒),通过测量发射回来的光子的时间,计算与物体的距离,进而快速创建周围环境的点云。激光雷达每秒钟可以创建高达150万个数据点。快速创建点云的能力,让激光雷达在自动驾驶等领域有了用武之地。
激光测距基于简单的数学原理,如图4示。光速恒定为300,000,000m/s,通过测量反射回光子的时间(TOF),可以计算出激光雷达与物体的距离(距离 = 速度 x 时间)。由于光速非常快,飞行时间可能非常短,因此要求测量设备具备非常高的精度。
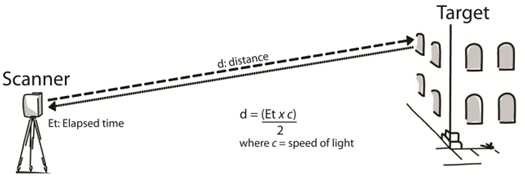
图4. 激光测距原理
图5表示基本的TOF测距系统。MCU控制何时开始测量,MCU 同时向激光器(Laser Control Circuit)和 TDC 发送开始脉冲(Start Pulse)。TDC 收到脉冲后开始计时,而激光器收到脉冲后则控制发射激光,光束在经过光学调整后发射到外围物体。在物体表明反射回来的光子通过镜头聚焦到检测器(Detector),由于信号非常微弱,须经过电路放大调理后再送到 TDC ,TDC 收到信号后停止计时。MCU 读取 TDC 的数据,进行后期处理计算得出与物体的距离。以上即完成一次激光测距的过程。
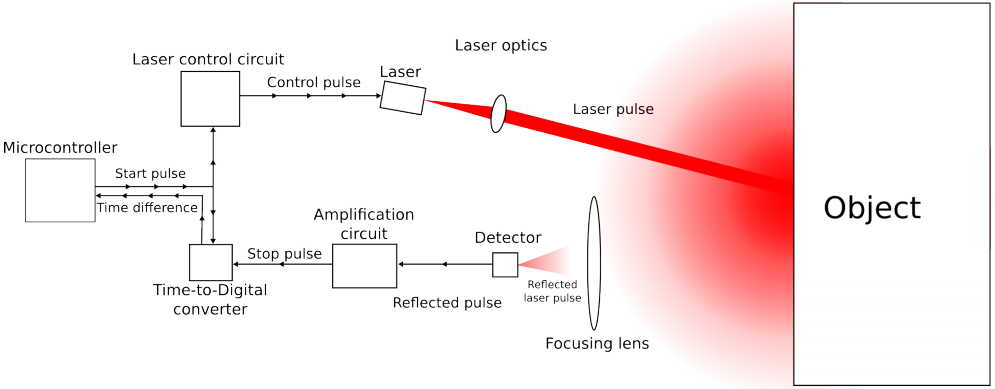
图5. TOF测量系统的基本组成
分类
根据应用领域划分:
- 机载激光雷达(Airborne liDAR)
- 地形激光雷达(Topographic LIDAR )
- 测深仪(Bathymetric LiDAR )
- 地面激光雷达(Terrestrial LiDAR)
- 静态(Static)
- 动态(Mobile)
机载激光雷达,由于传感器本身位置不固定,因此需要其它设备(GNSS/惯导)的辅助,将激光雷达测量的相对坐标系位置,转换为绝对坐标系中的位置。
根据技术特征,激光雷达主要有三种技术流派:
- 混合固态技术( Solid State Hybrid),以Velodyne产品为代表。IBEO也是使用该技术,但线束少于Velodyne。混合固态是目前应用于车载领域主要技术类型;
- 微机电技术(Mechanical Mechanism),以创业公司Quanergy为代表;
- 机械技术(Mechanical Mechanism),以传统公司Leica, Riegl等公司为代表,主要应用于高端工业领域
注:关于技术分类部分,由于笔者对于这块不甚精通,以上仅采用 Frost & Sullivan 行业报告 内介绍的分类,在另外的资料中提到的分类如下:
- Motor-Driven Mechanical Method
- Flash Method
- MEMS Method
- Optical Phased Array
- VCSEL Method
比如Quanergy的固态激光雷达就使用到光学相控阵列技术(Optical Phased Array )。笔者可能在后续的迭代中对该部分做适当的修改。
系统构成
绝大多数激光雷达系统主要包括四部分:
- 激光器
根据波长将激光分类,600~1000 nm 波长的常用于非科学目的测量,但是由于它们可以为人眼感知,需要限制最大功率以避免对人眼的伤害。1550nm 的激光,对于人眼不可见,高功率时也不会对人眼造成伤害,可以作为替代的选择,用于远距离和低精度目的的测量。1550nm 激光的另一个优势是它对于夜视镜不可见,可以用于军事领域。
机载激光雷达系统使用 1064nm 二极管泵浦 YAG 激光(Diode Pumped YAG Lasers,红外 ),测深系统(Bathymetric Systems )使用的是 532nm 的双二极管泵浦 YAG 激光(Double Diode Pumped YAG Lasers,绿色),532nm 激光相对于 1064nm 激光在穿透水面时衰减要小得多。脉冲越短,光子接收机部分可以有更高带宽处理增加的数据流,因此可以提高测量的分辨率。
本文提到的车载激光雷达领域的代表公司 Velodyne 和 IBEO 的激光波长均为905nm,至于这方面厂商是作何考虑,暂且存疑。
- 光学扫描部件
激光雷达成像的速度取决于外部反射的光子经光学扫描部件进入系统的速度。市场上存在许多扫描的方法以改变方位角和仰角,如双振荡平面镜、双轴扫描镜、多面镜等。光学扫描部件决定了激光雷达的分年率和检测范围(角度)。图6表示激光雷达的一种光学扫描部件的结构,详细说明参考链接资料。
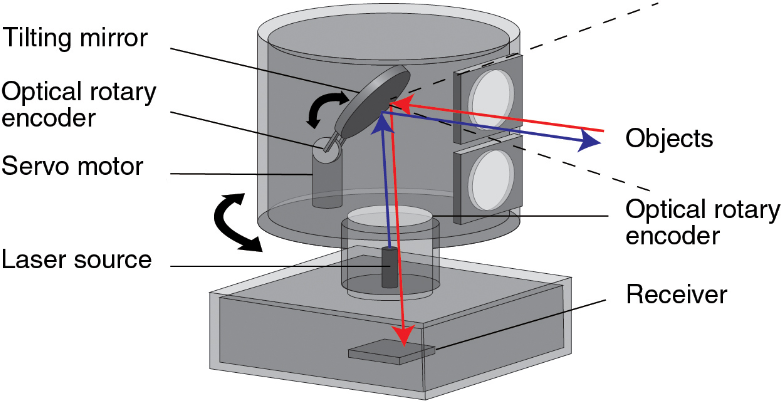
图6. 激光雷达光学扫描器部分(Optics and Encoders)
- 光电检测器和接收电路
光电检测器即读取和记录反射回到激光雷达的信号的设备。主要有两种光电检测技术,分别为固态检测器(Solid State Detector,如硅雪崩光电二极管 )和光电倍增管。
- 导航系统
当激光雷达安装在移动的平台,如卫星和飞机上时,它需要其它设备的协助以确定设备当前的位置和转向信息,这样才能保证激光雷达测量数据的可用性。GNSS 可以提供准确的地理位置信息,惯导(IMU)则记录当前位置激光雷达的姿态和转向信息。GNSS 和 IMU 配合使用,可以将激光雷达测量点由相对坐标系转换为绝对坐标系上的位置点,从而应用于不同的系统中。
以上,即绝大多数激光雷达系统的主要组成部分。图7是Velodyne 64线激光雷达 HDL-64E 的外视图,HDL-64E包含四组激光发射器,每组又包括16个激光发射机,共计 64 个激光发射单元。两组激光接收器,共 64 个激光接收单元。在安装基座(Mounting Base)上的激光雷达主体部分(Housing)以 5~15Hz 的速度作 360° 旋转。
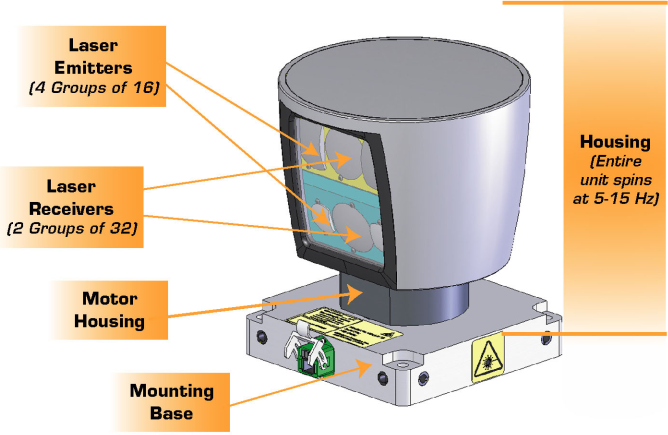
图7. Velodyne 64线式激光雷达HDL-64E
技术指标
- 线
为获得尽量详细的点云图,激光雷达必须要快速采集周围环境的数据。一种方式是提高发射机/接收机的采集速度,每个发射机在每秒内可以发送十万以上组脉冲,也就是说在 1 秒内,有 100,000 组脉冲完成一次发射/返回的循环。复杂的激光雷达有高达 64 组发射机/接收机,组就是线(Channel)的意思,线表示激光雷达系统包含独立的发射机/接收机的数目。多线的配置使得激光雷达在每秒内可构建高达百万的数据点。
图8示例多线激光雷达扫描的点云,图中每个同心圆表示一组激光器扫描的点云。对于两组相邻的激光器而言,其垂直间隔角是恒定的(下文“垂直角度分辨率”将介绍到)。因此距离越远,相邻激光器扫描的点云同心圆间隔越大。亦即,距离越远,数据的保真度越低。激光雷达对于近处的物体有更高的分辨率。
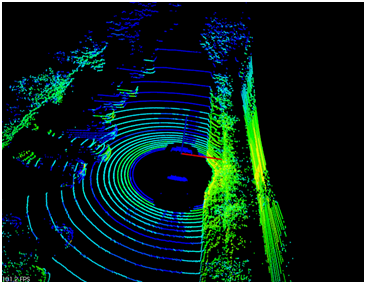
图8. 旋转镜头结构的激光雷达系统扫描的点云
- 方位角
方位角(Field of View, FOV)包括水平方位角和垂直方位角,指的是激光雷达在水平和垂直方向的检测角度。
上面提到线的概念,然而在实际应用中,64线对于构建周围环境精确的点云是远远不够的,它只能在有限范围内达到足够的精度。但是在制造工艺上,把线数提高到64组以上,将大大提高设备的成本,因此不少激光雷达系统采用旋转镜头,如图7,激光雷达的主体部分固定在旋转马达的基座上,工作时不断旋转,即可对周围360°进行扫描,也就是说这些激光雷达的水平方位角为 360° 。
垂直方位角指的是激光雷达垂直方向的检测角度,一般在40°以内(IBEO小型激光雷达垂直方向角只有3.2°)。如图9所示,为禾赛40线激光雷达激光扫描线示意图,其垂直方位角为 -16° ~ 7°。
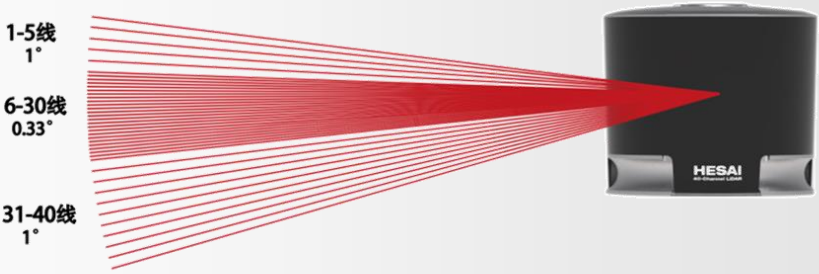
图9. 禾赛40线激光雷达扫描示意图
- 扫描帧频
激光雷达点云数据更新的频率。对于混合固态激光雷达来说,也就是旋转镜每秒钟旋转的圈数,单位 Hz 。例如,10Hz即旋转镜每秒转10圈,同一方位的数据点更新10次。
- 角度分辨率
分为水平角度分辨率和垂直角度分辨率。水平角度分辨率是指水平方向上扫描线间的最小间隔度数。它是随扫描帧频的变化而变化,转速越快,则水平方向上扫描线的间隔越大,水平角分辨率越大。垂直角度分辨率指的是垂直方向上两条扫描线的间隔度数。如上图9,激光雷达的垂直角度分辨率在 1~5 线间为 1°,在 6~30 线为 0.33° , 31~40 线为 1° 。
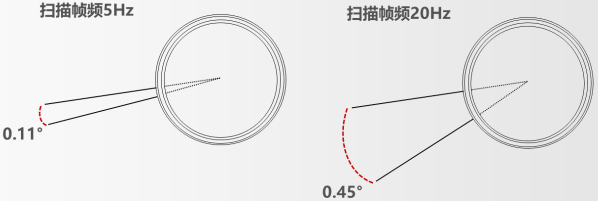
图10. 激光雷达水平角度分辨率
- 测量精度
激光雷达的数据手册中的测量精度(Accuracy)常表示为,例如 ± 2 cm (1 Sigmal) 的形式。精度表示设备测量位置与实际位置偏差的范围。既然精度(准确性)是个统计学概念,因此在标称测量精度时会说明置信水平(Confidence Level),置信水平以X Sigmal衡量。1 Sigmal 表示置信水平在68%,2 Sigmal 表示 95%。所以,上面提到的测量精度 ± 2 cm (1 Sigmal) 表示的意思是测量误差在 2cm 以内的概率为 68% 。
- 探测距离
激光雷达的最大测量距离。在自动驾驶领域应用的激光雷达的测距范围普遍在 100~200m 左右。
- 数据率
激光雷达每秒钟生成的激光点数,单位为 points/sec ,英文名称 Data Rate 或 Measurement Points。例如:40 线扫描帧频为 20Hz 的激光雷达,水平角分辨率是0.45°(每一圈每束激光扫描 800 次)。因此每秒钟生成的激光点数和为:40 x 20 x 800 = 640,000 points/sec。
局限性
- 高度反光物体
大多数物体的表面在微观层面上看是粗糙的,反射是全向的,虽然只有一小部分会反射到激光雷达的接收机,但也足够激光雷达来创建点云图。但是,如果物体表面是高度反光的,那么很可能激光在反射后没有多少返回到激光雷达接收机,将不足以创建该区域的点云。
- 环境因素
环境因素,如浓雾和雨雪,主要影响包括散射和衰减两方面。针对该问题的解决办法是提高激光发射功率,但对于小型设备或对功耗有要求的场合,这种方法并不适用。另外,阳光直射接收机也会影响到点云成像的质量,这也需要通过提高激光发射功率来解决。
- 数据刷新速率
对于混合固态激光雷达,数据刷新速率也就是光学旋转镜的旋转速率,一般在10~20Hz(一秒钟旋转10~20次)。例如,时速 120km/h 的汽车在 1/20s 内行驶的距离大概为 1.4m ,也就是说激光雷达对于这1.4m内周围环境的变化是一无所知的。激光雷达的作用距离一般在 100 ~ 120m ,对于行驶速度120km/h的汽车来说,也就是不到 4s 的反应时间。
- 成本
价格昂贵可能是目前激光雷达应用到自动驾驶领域的最大障碍,Velodyne最便宜的16线激光雷达官方售价 7,999 美金,国内的激光雷达也在 10~30 万左右(截止2017年4月)。
- 探测特性
尽管激光雷达是作为计算机视觉的传感器,但它的测量结果是仅仅基于物体的几何结构的,而不像人眼识别还包括色彩和纹理等信息。目前,激光雷达系统还无法区别石头和纸包。(根据不同材料反射率不同,激光雷达可以识别车道线)
市场趋势
在汽车领域,激光雷达是近几年来随着自动驾驶的兴起而发展起来的。激光雷达不同于毫米波和超声波雷达等传感器,它不属于传统的车载零部件,市场格局尚未稳定,而且目前激光雷达成本非常高,产品发展进化的空间很大,有大批科技公司正在进入这个领域。当前车载市场激光雷达的主要供应商包括硅谷的Velodyne和德国的IBEO(Valeo),国内包括速腾科技和禾赛科技均已有样品阶段的产品上市。表1列出在2016年时市场上主要激光雷达产品的型号信息(数据来源 IHS )。
在本篇文章初稿付梓(2017年4月)时,Velodyne 刚推出低成本的固态激光雷达 Velarray ,该激光雷达水平视角只有 120° ,Velarray不同于该公司先前的产品,它没有采用旋转镜头的结构。据Velodyne介绍,量产后Velarray的价格预计在几百美金。
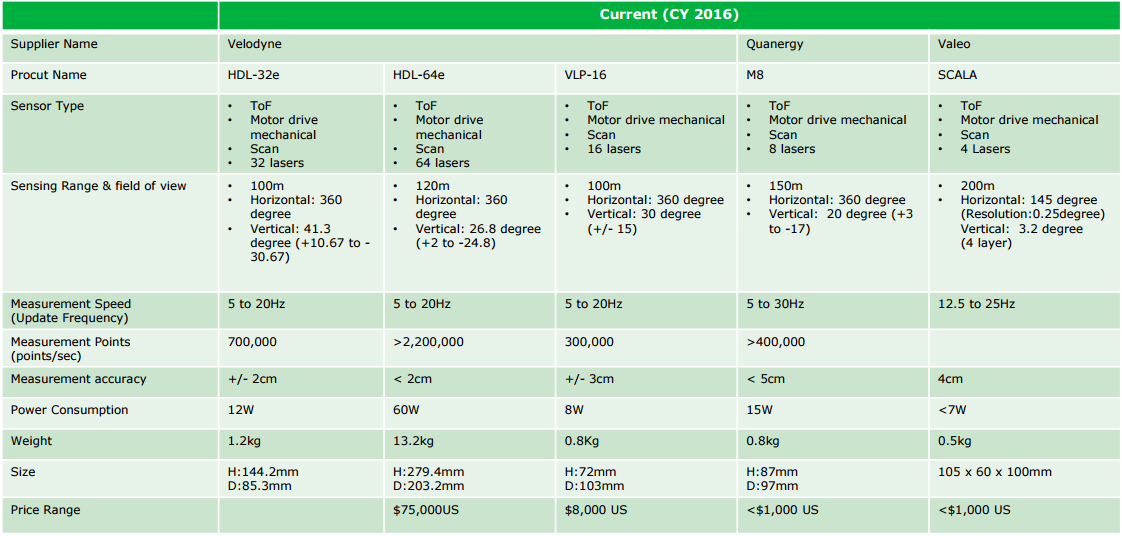
表1. 2D/3D 激光雷达产品(2016)
参考资料
- How does LiDAR work? -LiDAR-UK
- Engineer Explains: Lidar -Comet Labs Research Team
- Tesla & Google Disagree About LIDAR — Which Is Right? -Michael Barnad
- Highly Automated Vehicle Systems -University Of Technology and Economics Of Budapest
- LiDar Technology for Safer ADAS and Autonomous Automobiles -Micheal Poulin
- Optical encoders and LiDAR scanning -Renishaw
- Development of a low-cost laser range-finder -Chalmers
- 40线激光雷达产品手册 -禾赛科技